今回は、2019年8月23日金曜日放送、「チコちゃんに叱られる!」▽ロストサマー!二度と帰れないあの夏の日何してたっけSP のお話。
本日の最後のおまけ、靴紐ニュース。

初回の話は、こちら。
靴ヒモがほどけるのはなぜ?→ほどけるように結んでいるから。着地の衝撃と足振る遠心力でほどける。アン・セキュア・ノットが最強。
靴紐ニュース
2回目の話では、京都まで進んでいました。
もう少しでほどけそうな状態。
チコちゃん「その後どうなっているのか?さしこも続きが気になるでしょ?」
指原さん「眠れなかったです。」
チコちゃん「おいおいおい。言いすぎやねん。」
「第三話 靴ヒモ揺れてどんぶらこ」
スタートから670km進んだ岡山県に到達。
イアン・セキュア・ノットもちょう結びもまだほどけず。
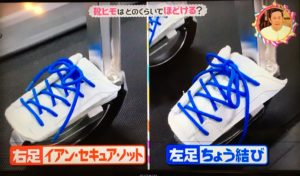
前回と同様、ちょう結びは結び目が緩んできているようです。
ここで名古屋工業大学から先生から電話が。
佐野明人教授が実験を担当。
ちょっとほどけそうになく、もうそろそろ。
そこで、佐野先生
「いっそ走らせてみます?」
と提案。
新開発の走行ロボットに装着。

そのスピードは4倍以上。
ただし、モーターは付いていません。
学生が、手動で力を加えて走らせる仕組み。
走行ロボットで実験継続
操縦者の学生さんが2本のレバーを交互に動かします。
走り出す走行ロボット。
すると、ついにちょう結びがほどけました。

結局2か月かけて670kmを歩いてもだめでしたが、走り出して213mでほどけました。
佐野先生「やっぱり違うな。走ると」
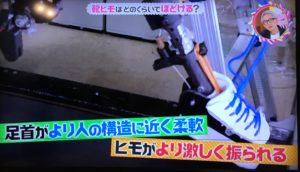
走行ロボットでは足首の構造が人の構造に近く柔軟、靴ヒモが激しく揺さぶられるのが影響したとのこと。
担当D「イアン・セキュア・ノットもほどくという難題にも挑戦しましょう!」
佐野教授「手動の部分をモーターに置き換える事が出来れば再度実験が出来るかも。」
「いつの日か最強のイアン・セキュア・ノットがほどける日を夢見て。」
という事で終了。
今回も最後まで読んでくれてありがとう。
他の記事もよろしくね。